10.2.1 Begriffe
Messen
Messungen genügender Genauigkeit sind die Grundlage für Berechnung, Überwachung und Abrechnung von technischen Anlagen. Die Regelung benötigt Messungen der Istwerte. Der Betreiber benötigt Messanzeigen für Optimierung und Unterhalt der Anlagen. Messwerte helfen, Fehler und Störungen zu finden und zu beheben. Korrektes Messen ist allerdings eine sehr anspruchsvolle Aufgabe. Eine Messeinrichtung kann als schwarzer
Kasten aufgefasst werden, dessen innere Wirkungsweise hier unwichtig ist (Bild 10.4). Er hat als Eingangssignal die Messgrösse und als Ausgangssignal den Messwert als Abbild der Messgrösse.
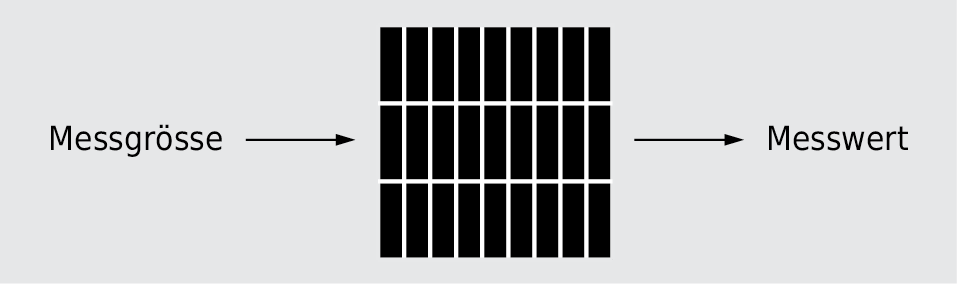
Bild 10.4 Messeinrichtung als Black box
Es gibt allerdings keine Messung, welche nicht von Fremdeinflüssen gestört wird. Wenn beispielsweise ein Fernthermometer abgelesen wird, so braucht die Anzeige noch lange nicht die effektiv herrschende Temperatur zu sein. Einige Einflussgrössen, welche Messungen verfälschen können:
- Temperatur, Wärmestrahlung
- Feuchte
- Luftbewegung, Luftdruck
- Lage
- Beschleunigungen (Erschütterungen, Stösse)
- Störfelder, Störspannungen
- Hilfsenergie (Netzspannung, Netzfrequenz)
- thermische Übergangswiderstände
Steuern
Bild 10.5 zeigt ein Beispiel einer automatischen Steuerung der Raumtemperatur. Abhängig von der Aussentemperatur beeinflusst die Steuereinrichtung, über eine vorgegebene Kennlinie, die Ventilstellung. Die Steuerung ist durch eine offene Steuerkette gekennzeichnet: Aussenfühler–Steuergerät–Stellantrieb–Stellorgan–Heizkörper–Raum. Offensichtlich wird die Raumtemperatur nicht nur von der Steuereinrichtung (= Aussenfühler + Steuergerät + Stellantrieb) beeinflusst, sondern auch von der Sonneneinstrahlung. Eine Rückmeldung der Ausgangsgrösse xa an die Steuereinrichtung findet trotz Störung nicht statt. Je stärker die Störgrössen, desto weniger wird es möglich sein, eine befriedigende Ausgangsgrösse zu erhalten. Dies ist das Merkmal der Steuerung.
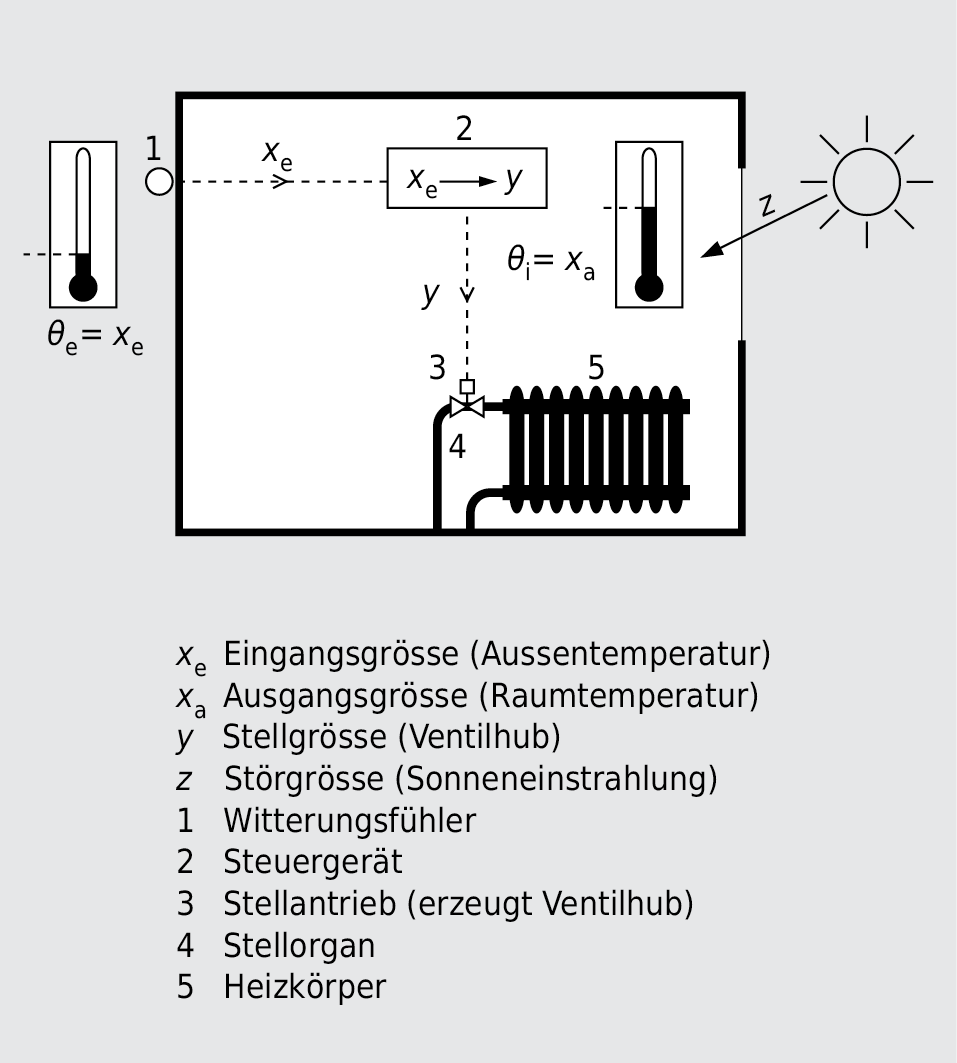
Bild 10.5 Beispiel einer Steuerung der Raumtemperatur
Regeln
Bei der Regelung wird die zu regelnde Grösse (Regelgrösse x) fortlaufend gemessen, mit einer Führungsgrösse w verglichen und an die Führungsgrösse angeglichen. Durch Störgrössen z von aussen hervorgerufene Veränderungen der Regelgrösse werden so fortlaufend korrigiert. Ist die Führungsgrösse konstant, nennt man sie Sollwert.
Bild 10.6 zeigt ein Beispiel einer automatischen Regelung der Raumtemperatur. Die Raumlufttemperatur ist infolge von Störgrössen (Sonne, Aussentemperatur) momentan 24 °C. Dem Regelgerät kann der Wert der Führungsgrösse w eingegeben werden, gegenwärtig 20 °C. Der Fühler misst x = 24 °C und meldet dies dem Regler. Der Regler vergleicht x mit w und stellt eine Regelabweichung xw = x – w fest. Er meldet deshalb dem Stellantrieb eine neue Stellgrösse y, worauf der Antrieb diesen Hub einstellt. Als Folge davon sinkt die Wärmeabgabe des Heizkörpers, und die Regelgrösse x fällt. Natürlich wird die Regelgrösse x auch von der Störgrösse z beeinflusst. Der Regler vergleicht fortlaufend x mit w und gibt entsprechende Korrekturbefehle an den Stellantrieb. Er regelt damit die Raumtemperatur.
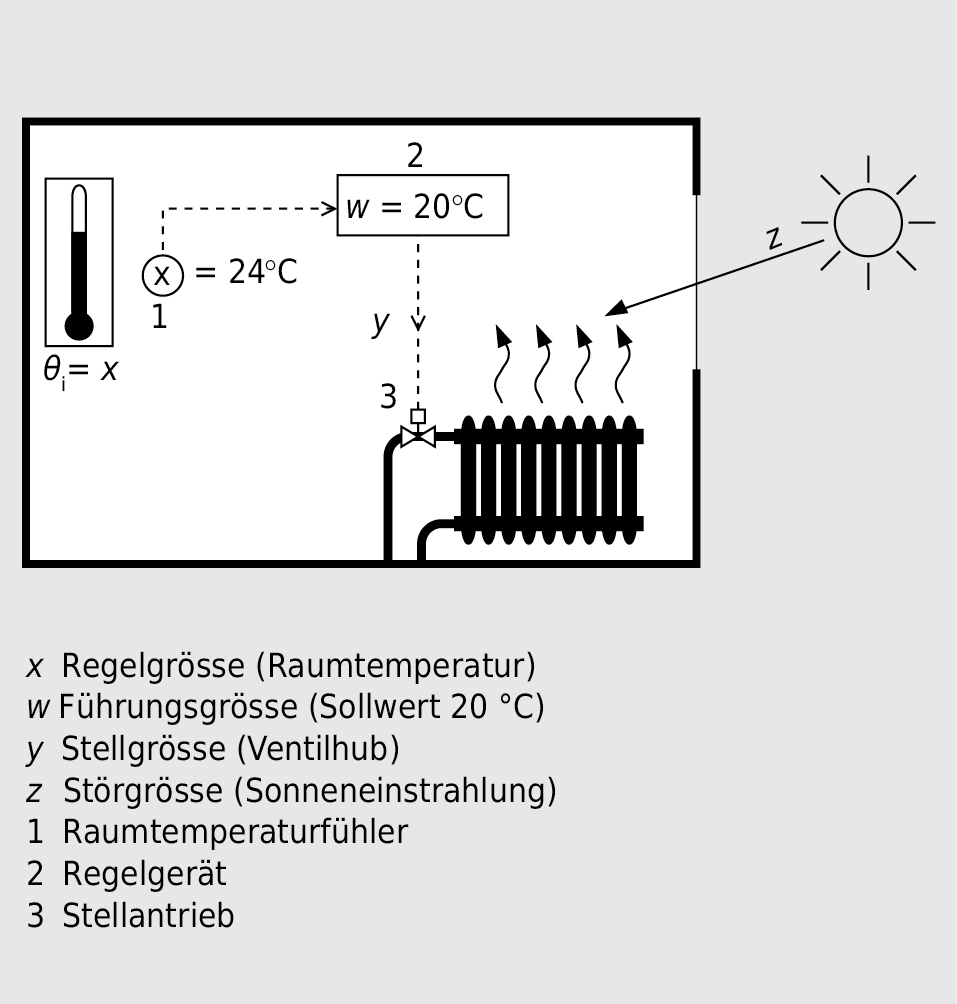
Bild 10.6 Beispiel einer Regelung der Raumtemperatur
Die Regelung ist durch einen geschlossenen Regelkreis gekennzeichnet: Raumfühler–Regelgerät– Stellantrieb–Stellorgan–Heizkörper–Raum–Raumfühler. Die neue Regelgrösse wird dem Regler rückgemeldet, und dies wird verwertet. Dies ist das Merkmal der Regelung.
10.2.2 Regelstrecke
Abgrenzung
Die Regelstrecke beginnt am Stellort (Ort, wo die Stellgrösse in den Massen- oder Energiestrom eingreift) und endet am Messort. Das Stellorgan gehört zur Regelstrecke (nicht aber der Stellantrieb). Der Messfühler gehört ebenfalls zur Regelstrecke.
Zeitverhalten von Regelstrecken
Es stellen sich zwei Fragen, die beide experimentell beantwortet werden:
- Wie reagiert die Regelgrösse auf eine plötzliche Änderung der Stellgrösse? Dazu wird die Stellgrösse y sprunghaft geändert (z = konstant) und die Reaktion der Regelgrösse x beobachtet. Die Stellgrössen-Sprungantwort charakterisiert das sogenannte Führungsverhalten.
- Wie reagiert die Regelgrösse auf eine plötzliche Änderung einer Störgrösse? Dazu wird eine Störgrösse z sprunghaft geändert (y = konstant) und x beobachtet. Die Störgrössen-Sprungantwort charakterisiert das sogenannte Störverhalten.
Wenn die Regelgrösse nach jeder Änderung einen Beharrungszustand erreicht, spricht man von einer Regelstrecke mit Ausgleich. Praktisch alle Regelstrecken der Gebäudetechnik sind von diesem Typ.
Bild 10.7 zeigt das Zeitverhalten eines Wasserspeichers nach dem Einschalten des Stroms. Bestimmend sind die Leistung der Heizung, die Wassermenge und die Wärmeverluste.
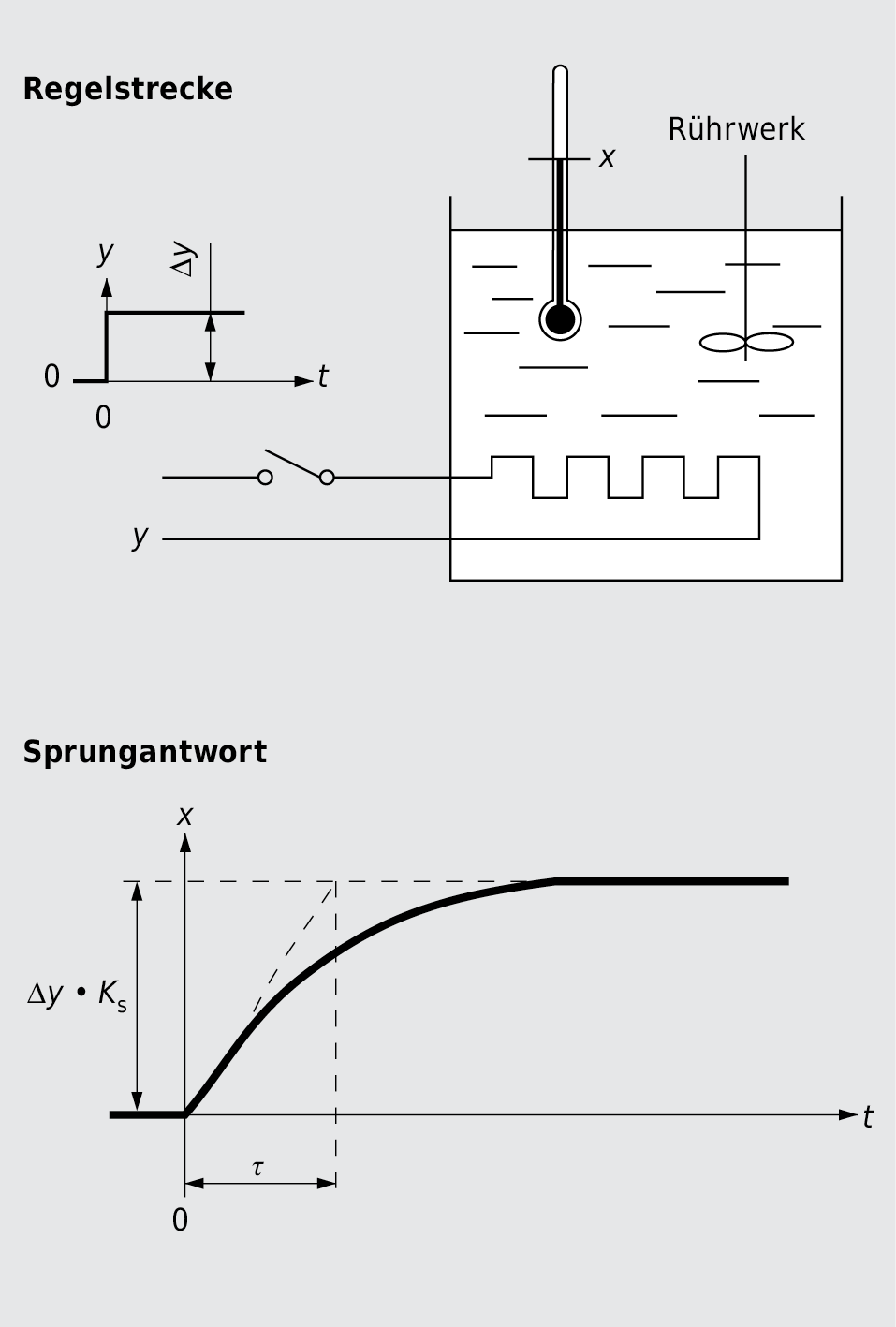
Bild 10.7 Sprungantwort einer Regelstrecke mit einem Speicher (sogenanntes PT1-Glied)
Bild 10.8 zeigt das Verhalten des Temperaturfühlers einer Beimischschaltung nach dem Verstellen des Ventilhubs. Bei der Fühlerplatzierung ist grundsätzlich auf eine geringe Totzeit zu achten (L klein). Wenn allerdings die Pumpe im Rücklauf eingebaut ist, entfällt deren Mischwirkung. Dann muss L/D > 25 sein oder ein statischer Mischer eingebaut werden. In Wirklichkeit sind weder Rohr noch Fühler trägheitslos, so dass der Anstieg der Regelgrösse nach der Totzeit nicht sprunghaft, sondern ähnlich Bild 10.7 erfolgt. Der Übertragungsbeiwert der Regelstrecke Ks = Δx / Δy ist beim Speicher praktisch unabhängig von y (sogenannte P-Regelstrecke), während dies bei der Beimischschaltung meist nicht der Fall ist.
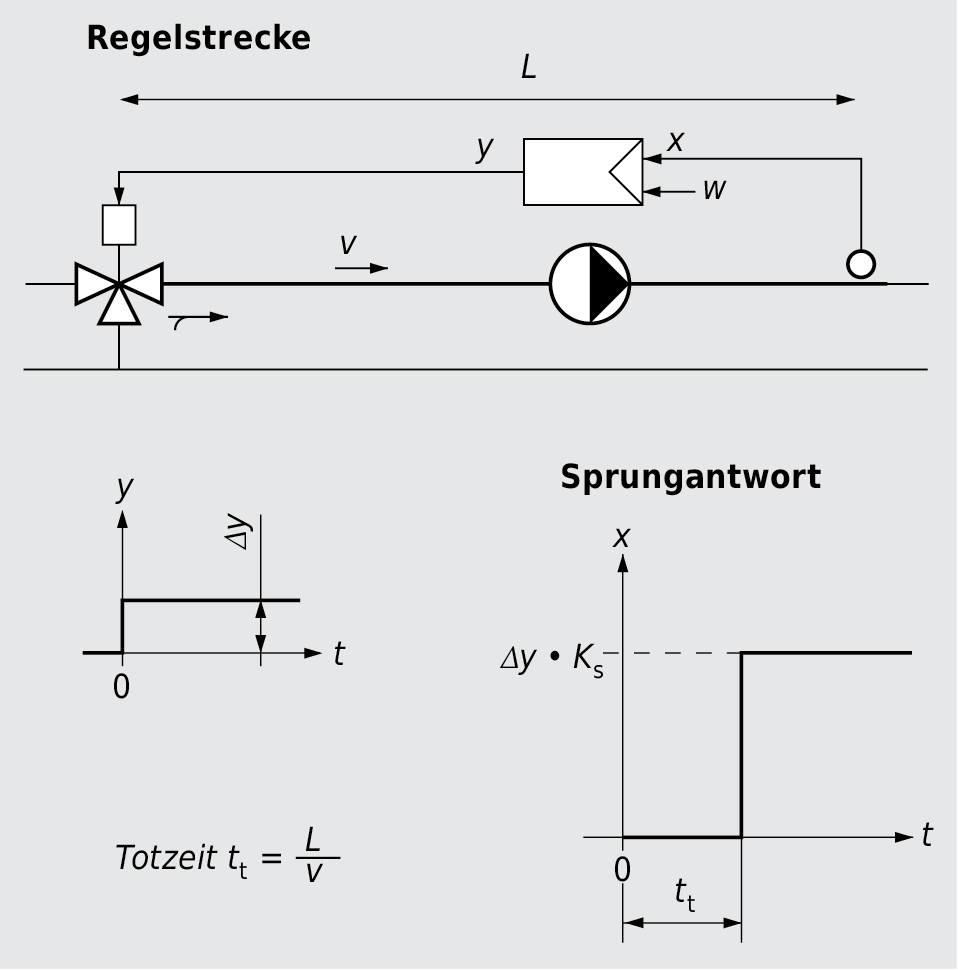
Bild 10.8 Sprungantwort der Regelstrecke einer Beimischschaltung bei masselosem Rohr und Fühler (sogenanntes Totzeitglied)
Schwierigkeitsgrad der Regelstrecke
Das Zeitverhalten einer beliebigen Regelstrecke lässt sich mit der Verzugszeit tu, der Ausgleichszeit tg und dem Übertragungsbeiwert Ks beschreiben. Bild 10.9 zeigt die Störgrössen-Sprungantworten von zwei verschiedenen Regelstrecken:
- Die obere Sprungantwort weist im Verhältnis zur Ausgleichszeit tg eine kleine Verzugszeit tu auf. Eine Störung ist für den Regler bereits nach kurzer Zeit erkennbar, und er kann entsprechend schnell darauf reagieren.
- Die untere Sprungantwort hat bei gleicher Ausgleichszeit tg eine wesentlich längere Verzugszeit tu. Der Regler kann eine Störung erst spät erkennen. Er wird deshalb Mühe haben, korrigierend einzugreifen.
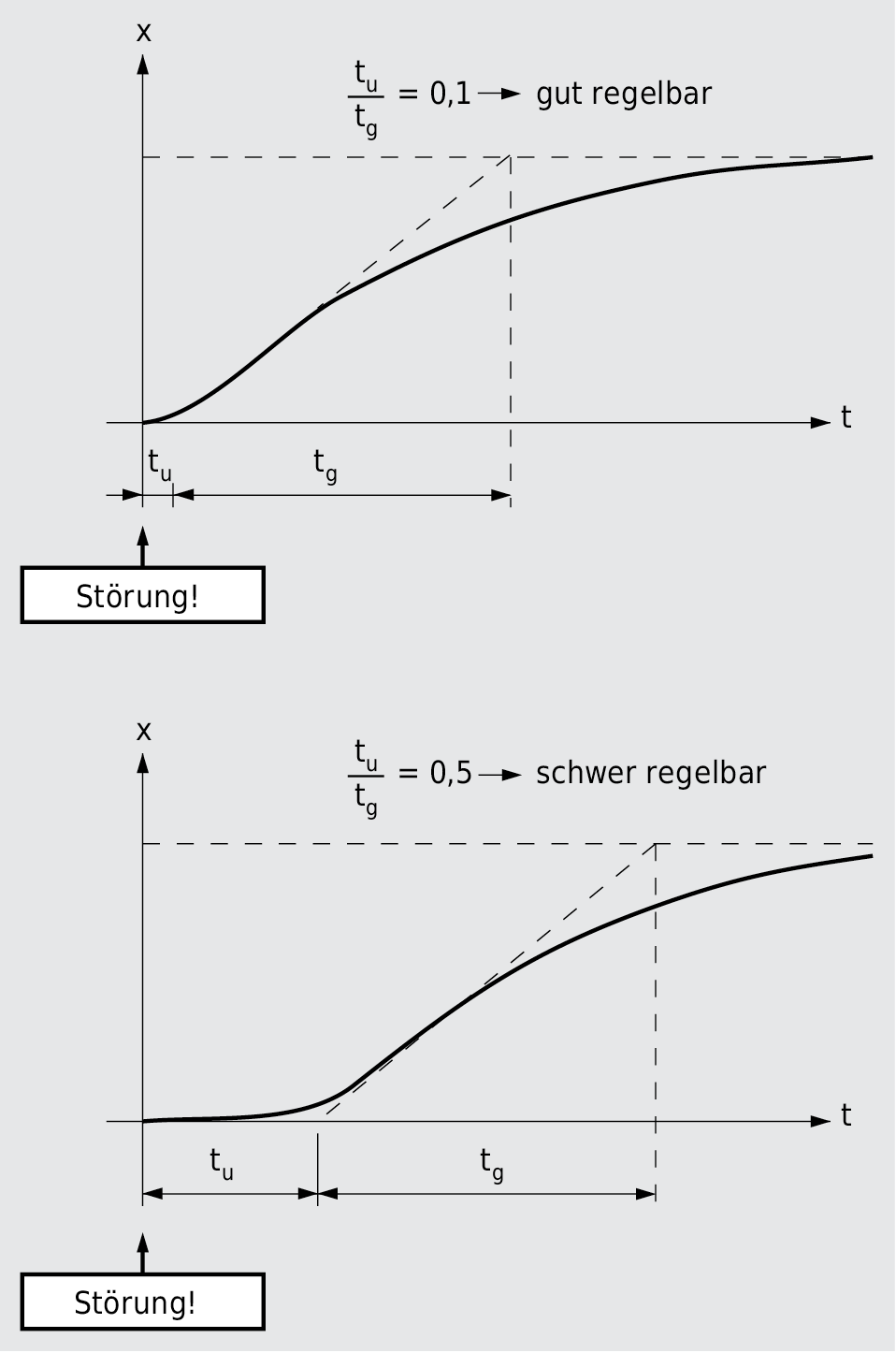
Bild 10.9 Störgrössen-Sprungantworten einer einfachen und einer schwierigen Regelstrecke
Daraus ist ersichtlich, dass das Verhältnis von Verzugszeit zu Ausgleichszeit den Schwierigkeitsgrad S der Regelstrecke bestimmt.

Typische Regelstrecken der Heizungstechnik weisen eher kleine, solche der Lüftungstechnik eher grosse Schwierigkeitsgrade auf.
10.2.3 Regeleinrichtung
Abgrenzung
Zur Regeleinrichtung gehören diejenigen Geräte, die unmittelbar für die Beeinflussung der Regelstrecke benötigt werden. Die Regeleinrichtung enthält mindestens eine Einrichtung
- zum Erfassen der Regelgrösse x,
- zum Vergleich mit der Führungsgrösse w und
- zum Bilden der Stellgrösse y.
Das Zeitverhalten einer Regelstrecke kann vom Regelungstechniker kaum beeinflusst werden. Deshalb ist es notwendig, den Regler möglichst gut an die Eigenschaften der Regelstrecke anzupassen. Dazu stehen folgende Reglerarten zur Verfügung:
- Stetige Regler können die Stellgrösse stufenlos und mit praktisch beliebiger Geschwindigkeit ändern, z.B. P-, PI-, PID-Regler.
- Unstetige Regler können die Stellgrösse nur sprunghaft in zwei oder mehreren Stufen verstellen, z.B. Zweipunktregler Ein-Aus (Thermostaten).
- Stetigähnliche Regler, z.B. Dreipunktregler (Auf-Stillstand-Zu), wirken auf einen Stellmotor.
Der Proportional-Regler verändert die Stellgrösse proportional zur Regelabweichung. P-Regler sind sehr verbreitet, z.B. Regler ohne Hilfsenergie (Thermostatventile, Überströmventile). Bild 10.10 zeigt die Wirkungsweise. Der Schieber 1 lässt sich um den Stellbereich Yh bewegen. Das Verhältnis a/b des Hebelarms bestimmt den Bereich, um den der Wasserstand sinken bzw. steigen muss, bis der Schieber offen bzw. geschlossen ist. Dieser sogenannte P-Bereich Xp beträgt hier 30 cm. Der Sollwerteinsteller ist so eingestellt, dass bei einem Wasserstand von 200 cm das Stellorgan 50 % geöffnet ist. Eine Störung wird automatisch über die Zuflussmenge ausgeregelt. Nun fällt auf, dass für eine bestimmte Korrektur zuerst eine bestimmte Abweichung vom Sollwert auftreten muss. Der P-Regler hat eine lastabhängige bleibende Regelabweichung (P-Abweichung). Wie gross diese ist, hängt von der Einstellung und vom P-Bereich ab:
- Wenn der Regler, wie gezeichnet, auf 50 % Last eingestellt ist, tritt die grösste bleibende Regelabweichung bei Volllast und bei Nulllast auf und beträgt die Hälfte des P-Bereichs.
- Bei Einstellung auf Nulllast (bzw. Volllast) tritt die grösste bleibende Regelabweichung bei Volllast (bzw. Nulllast) auf und entspricht dem ganzen P-Bereich.
Am zweckmässigsten ist es, den Regler auf den häufigsten Arbeitspunkt einzustellen. Dann treten nur unter extremen Bedingungen grössere Abweichungen auf. Es ist möglich, den P-Bereich zu verkleinern, indem das Verhältnis a/b vergrössert wird. Leider wird dabei der Regler empfindlicher, z.B. auf Wellen. Damit steigt die Gefahr einer instabilen Regelung, d.h., dass die Regelgrösse zu schwingen beginnt. Die Wahl des P-Bereichs ist immer ein Kompromiss zwischen Stabilität und Genauigkeit.
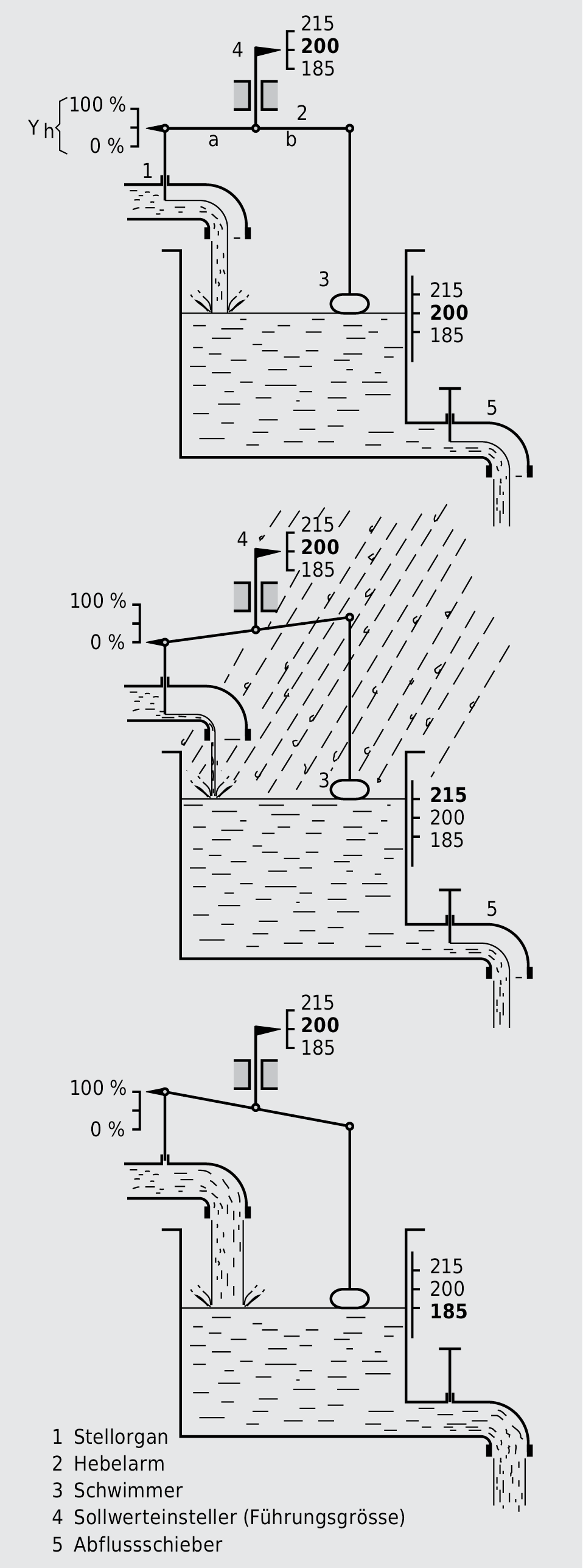
Bild 10.10 Wasserstandsregelung mit P-Regler
I-Regler
Der Integral-Regler verändert die Stellgrösse um so schneller, je grösser die Regelabweichung ist. Er verändert die Stellgrösse so lange, bis die Regelabweichung null wird. Der I-Regler ist jedoch sehr langsam und wird deshalb kaum eingesetzt.
PI-Regler
Der P-Regler ist schnell, aber ungenau, der I-Regler langsam, aber genau. Der Proportional-Integral-Regler ist die Kombination der beiden: schnell und genau. Er wird sehr oft eingesetzt.
PD-Regler
Je grösser die Änderungsgeschwindigkeit der Regelabweichung ist, desto grösser wird voraussichtlich die notwendige Stellgrössenkorrektur. Durch Kombination des P-Reglers mit einem sogenannten D-Glied ist es möglich, diesen noch schneller zu machen. Der PD-Regler hat ebenfalls eine bleibende Regelabweichung. Er wird kaum eingesetzt.
PID-Regler
Der Proportional-Integral-Differential-Regler stellt die Kombination der positiven Eigenschaften obiger Regler dar. Er ist sehr schnell und genau und damit auch für schwierige Regelstrecken geeignet. Er wird sehr oft eingesetzt.